
About Me
I am currently working as a Robotics Research Engineer at CowaRobot), based in Shanghai, China, where I focus on Reinforcement Learning for wheeled-legged robots, humanoids, robotic arm and quadrupeds. Additionally, I am actively involved in VLA and Reward Model to advance robotic manipulation.
I received my Bachelor’s degree in Armored Vehicle Engineering from Beijing Institute of Technology in 2022, advised by Prof. Chaoyang Jiang, with a research focus on MPC-based trajectory tracking control for autonomous vehicles. I subsequently obtained my Master’s degree in Engineering from Beijing Institute of Technology in 2025, advised by Prof. Zeang Zhao, in collaboration with Direct Drive Tech, where I worked on RL-based locomotion policy for bipedal–wheeled robot named Diablo.
During my graduate studies, I completed an internship at JD.com, focusing on the development of a vision-based teleoperation framework for the RealMan robotic arm and LeapHand. Since August 2025, I have been working at CowaRobot), where I have successfully deployed RL policies on multiple self-research robotic platforms. My work also involves building teleoperation systems and VLA pilelines, covering data collection, algorithm development, and deployment.
Throughout my academic and industrial journey, I have developed strong sim2real expertise, with hands-on experience in end-to-end deployment of control and learning systems—from simulation and training to real-world execution—across diverse robotic platforms, including wheel-legged robots, humanoid robots, robotic arm, dexterous Hand, quadrupeds and autonomous vehicles.
Beyond academics and research...
I am outgoing and curious, always eager to meet interesting people😊 and through them discover new perspectives on the world around me🌟. In my free time, I enjoy playing badminton 🏸, singing 🎶, photography 📷, and traveling ✈️.Research Interests
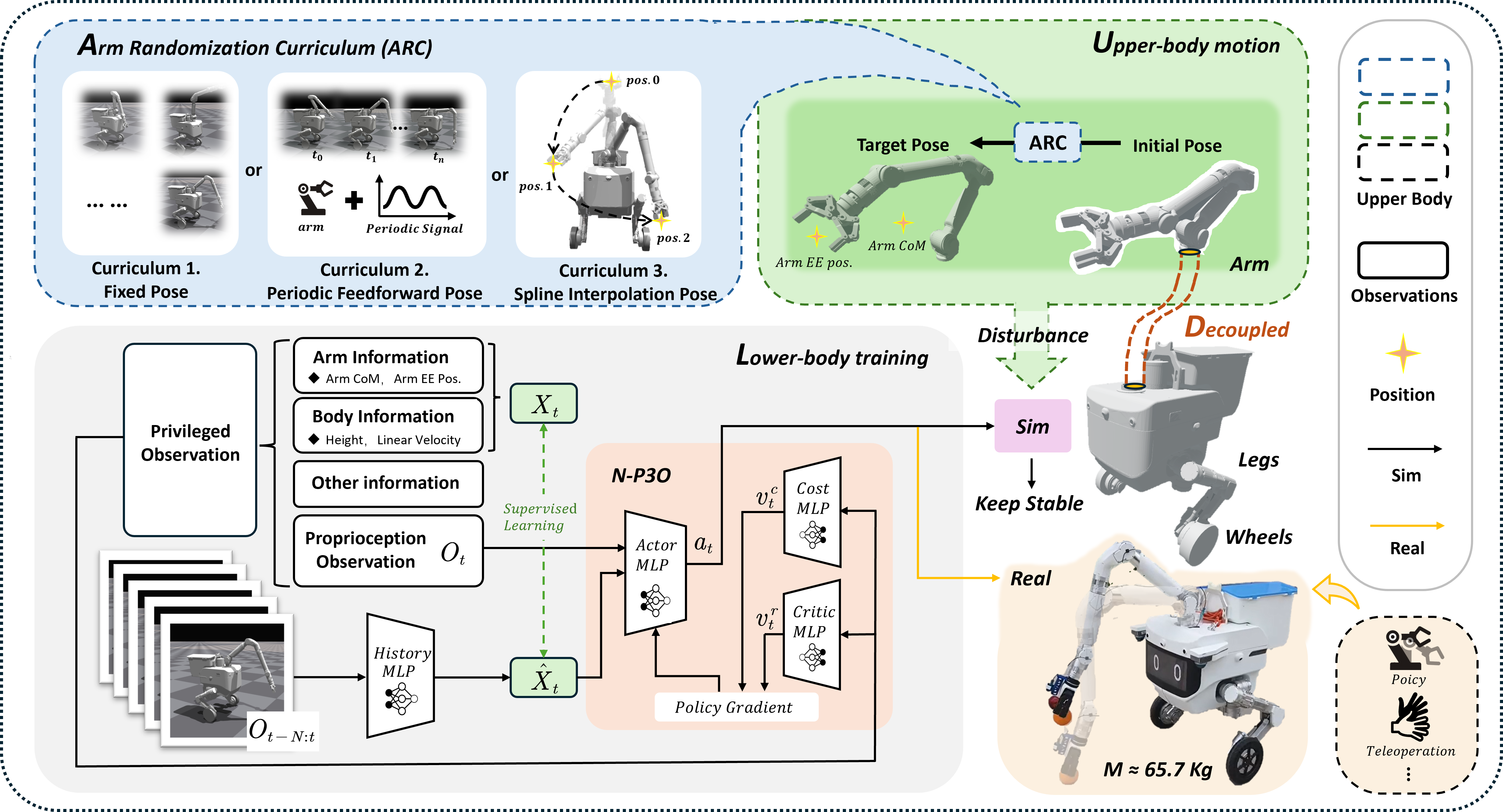
- Whole-Body Control for Loco-Manipulation 🤖: Reinforcement learning for robust real-world deployment; Learning-based whole-body control for (wheeled-)legged robots, enabling coordinated locomotion and manipulation
- Dexterous Manipulation🖐️: Scaleble skill learning from scalable data; Vision–language–action models
- Sim2Real📈: Bridging the gap between simulation and real-world deployment; Physics parameter alignment for reliable sim2real transfer across diverse robotic platforms, including custom in-house hardware
Publications & Projects
-
 accepted
International Conference on Intelligent Robots and Systems (IROS), 2026.
accepted
International Conference on Intelligent Robots and Systems (IROS), 2026. -
 accepted
accepted
 In submission
In submission
Powered by Jekyll and Minimal Light theme.